#include "yolo_v2_class.hpp"
|
| static float | get_distance (float src_x, float src_y, float dst_x, float dst_y) |
| |
◆ track_kalman_t()
| track_kalman_t::track_kalman_t |
( |
int |
_max_objects = 1000, |
|
|
int |
_min_frames = 3, |
|
|
float |
_max_dist = 40, |
|
|
cv::Size |
_img_size = cv::Size(10000, 10000) |
|
) |
| |
|
inline |
◆ calc_dt()
| float track_kalman_t::calc_dt |
( |
| ) |
|
|
inline |
◆ clear_old_states()
| void track_kalman_t::clear_old_states |
( |
| ) |
|
|
inline |
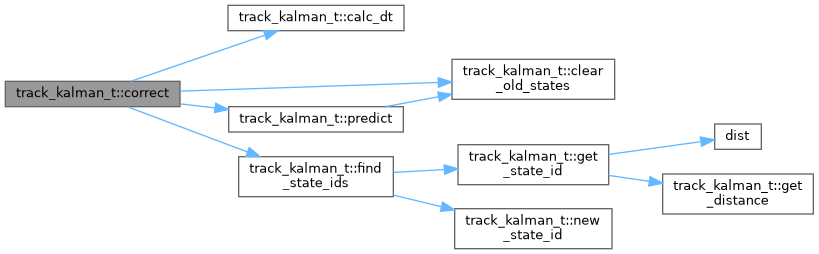
◆ correct()
| std::vector< bbox_t > track_kalman_t::correct |
( |
std::vector< bbox_t > |
result_vec | ) |
|
|
inline |
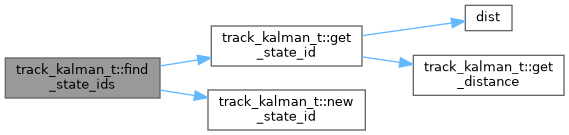
◆ find_state_ids()
| std::vector< tst_t > track_kalman_t::find_state_ids |
( |
std::vector< bbox_t > |
result_vec | ) |
|
|
inline |
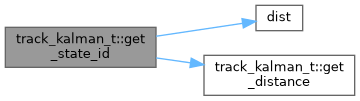
◆ get_distance()
| static float track_kalman_t::get_distance |
( |
float |
src_x, |
|
|
float |
src_y, |
|
|
float |
dst_x, |
|
|
float |
dst_y |
|
) |
| |
|
inlinestatic |
◆ get_state_id()
| tst_t track_kalman_t::get_state_id |
( |
bbox_t |
find_box, |
|
|
std::vector< bool > & |
busy_vec |
|
) |
| |
|
inline |
◆ new_state_id()
| tst_t track_kalman_t::new_state_id |
( |
std::vector< bool > & |
busy_vec | ) |
|
|
inline |
◆ predict()
| std::vector< bbox_t > track_kalman_t::predict |
( |
| ) |
|
|
inline |
◆ dT
◆ global_last_time
| std::chrono::steady_clock::time_point track_kalman_t::global_last_time |
|
private |
◆ img_size
| cv::Size track_kalman_t::img_size |
◆ kalman_vec
◆ max_dist
| const float track_kalman_t::max_dist |
◆ max_objects
| int track_kalman_t::max_objects |
◆ min_frames
| int track_kalman_t::min_frames |
◆ result_vec_pred
| std::vector<bbox_t> track_kalman_t::result_vec_pred |
◆ track_id_counter
| int track_kalman_t::track_id_counter |
|
private |
◆ track_id_state_id_time
| std::vector<tst_t> track_kalman_t::track_id_state_id_time |
The documentation for this class was generated from the following file: