#include "yolo_v2_class.hpp"
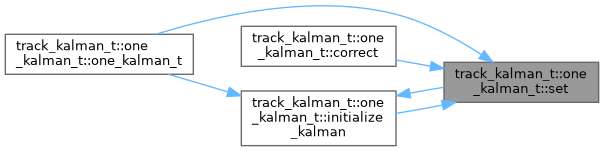
◆ one_kalman_t()
| track_kalman_t::one_kalman_t::one_kalman_t |
( |
int |
_stateSize = 6, |
|
|
int |
_measSize = 4, |
|
|
int |
_contrSize = 0 |
|
) |
| |
|
inline |
◆ correct()
| void track_kalman_t::one_kalman_t::correct |
( |
bbox_t |
box | ) |
|
|
inline |
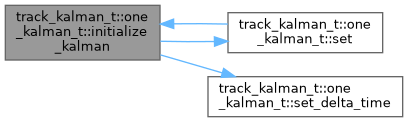
◆ initialize_kalman()
| void track_kalman_t::one_kalman_t::initialize_kalman |
( |
| ) |
|
|
inline |
◆ predict()
| bbox_t track_kalman_t::one_kalman_t::predict |
( |
| ) |
|
|
inline |
◆ set()
| void track_kalman_t::one_kalman_t::set |
( |
bbox_t |
box | ) |
|
|
inline |
◆ set_delta_time()
| void track_kalman_t::one_kalman_t::set_delta_time |
( |
float |
dT | ) |
|
|
inline |
◆ contrSize
| int track_kalman_t::one_kalman_t::contrSize |
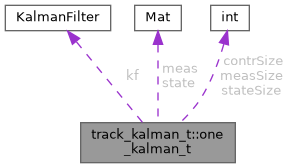
◆ kf
| cv::KalmanFilter track_kalman_t::one_kalman_t::kf |
◆ meas
| cv::Mat track_kalman_t::one_kalman_t::meas |
◆ measSize
| int track_kalman_t::one_kalman_t::measSize |
◆ state
| cv::Mat track_kalman_t::one_kalman_t::state |
◆ stateSize
| int track_kalman_t::one_kalman_t::stateSize |
The documentation for this struct was generated from the following file: