|
Darknet/YOLO v5.0-41-g593bddc
Object Detection Framework
|

|
|
Darknet/YOLO v5.0-41-g593bddc
Object Detection Framework
|
|

Functions | |
| void | backward_yolo_layer (Darknet::Layer &l, Darknet::NetworkState state) |
| void | correct_yolo_boxes (Darknet::Detection *dets, int n, int w, int h, int netw, int neth, int relative, int letter) |
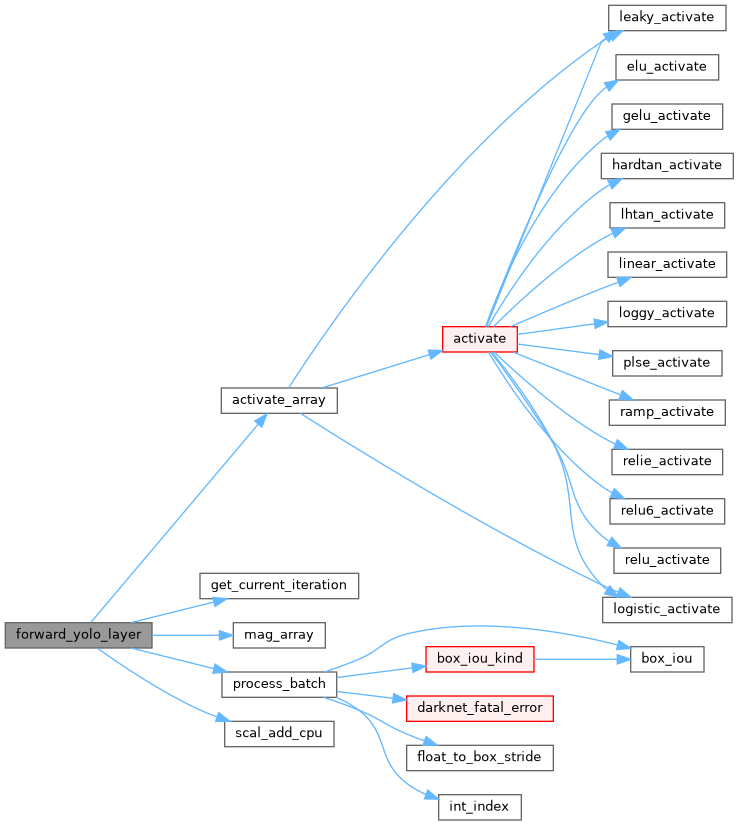
| void | forward_yolo_layer (Darknet::Layer &l, Darknet::NetworkState state) |
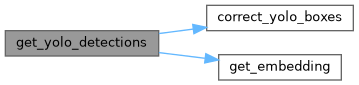
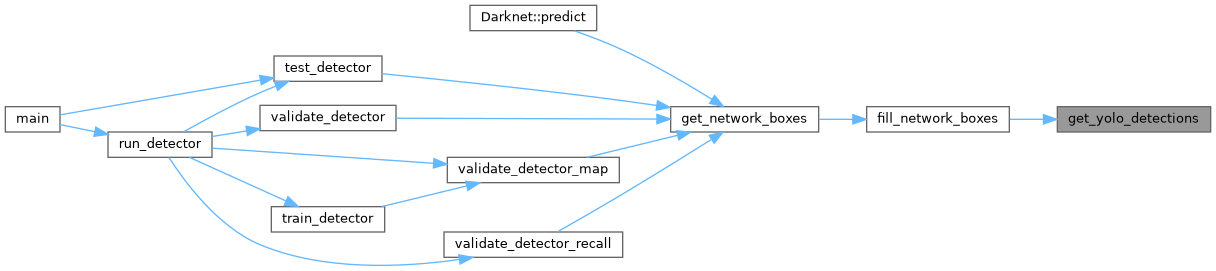
| int | get_yolo_detections (const Darknet::Layer &l, int w, int h, int netw, int neth, float thresh, int *map, int relative, Darknet::Detection *dets, int letter) |
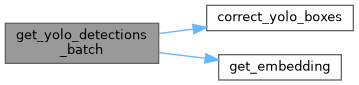
| int | get_yolo_detections_batch (const Darknet::Layer &l, int w, int h, int netw, int neth, float thresh, int *map, int relative, Darknet::Detection *dets, int letter, int batch) |
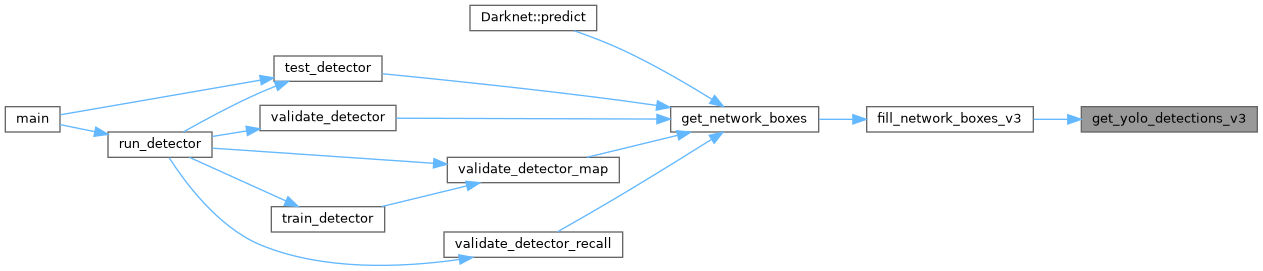
| int | get_yolo_detections_v3 (Darknet::Network *net, int w, int h, int netw, int neth, float thresh, int *map, int relative, Darknet::Detection *dets, int letter, Darknet::Output_Object_Cache &cache) |
| Convert everything we've detected into bounding boxes and confidence scores for each class. | |
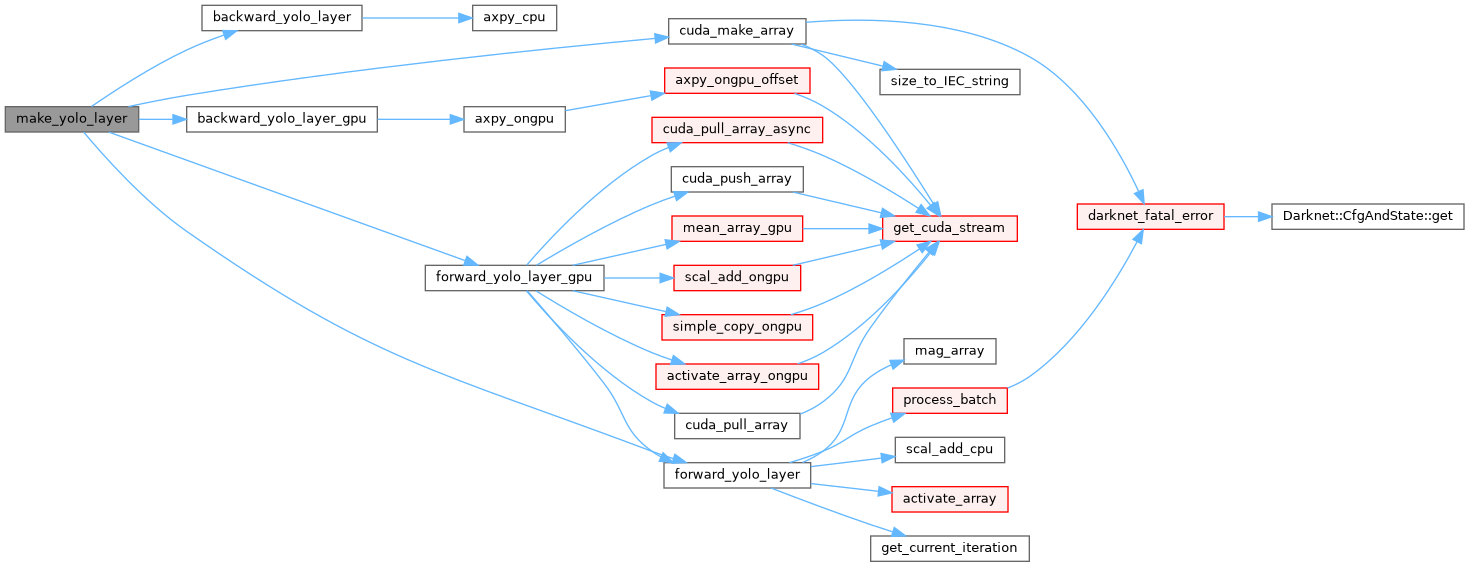
| Darknet::Layer | make_yolo_layer (int batch, int w, int h, int n, int total, int *mask, int classes, int max_boxes) |
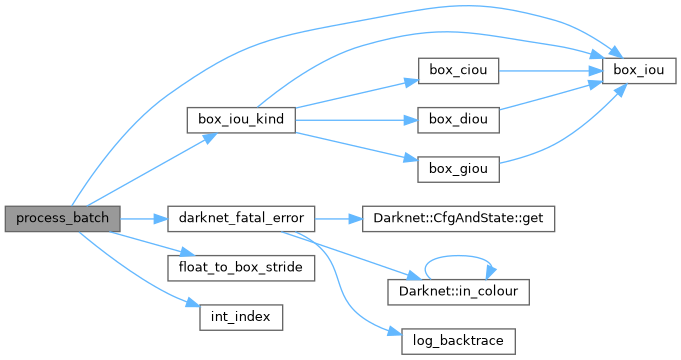
| void | process_batch (void *ptr) |
| void | resize_yolo_layer (Darknet::Layer *l, int w, int h) |
| int | yolo_num_detections (const Darknet::Layer &l, float thresh) |
| int | yolo_num_detections_batch (const Darknet::Layer &l, float thresh, int batch) |
| int | yolo_num_detections_v3 (Darknet::Network *net, const int index, const float thresh, Darknet::Output_Object_Cache &cache) |
| Count the number of objects found in the current image. | |
| void backward_yolo_layer | ( | Darknet::Layer & | l, |
| Darknet::NetworkState | state | ||
| ) |


| void correct_yolo_boxes | ( | Darknet::Detection * | dets, |
| int | n, | ||
| int | w, | ||
| int | h, | ||
| int | netw, | ||
| int | neth, | ||
| int | relative, | ||
| int | letter | ||
| ) |

| void forward_yolo_layer | ( | Darknet::Layer & | l, |
| Darknet::NetworkState | state | ||
| ) |

| int get_yolo_detections | ( | const Darknet::Layer & | l, |
| int | w, | ||
| int | h, | ||
| int | netw, | ||
| int | neth, | ||
| float | thresh, | ||
| int * | map, | ||
| int | relative, | ||
| Darknet::Detection * | dets, | ||
| int | letter | ||
| ) |
| int get_yolo_detections_batch | ( | const Darknet::Layer & | l, |
| int | w, | ||
| int | h, | ||
| int | netw, | ||
| int | neth, | ||
| float | thresh, | ||
| int * | map, | ||
| int | relative, | ||
| Darknet::Detection * | dets, | ||
| int | letter, | ||
| int | batch | ||
| ) |

| int get_yolo_detections_v3 | ( | Darknet::Network * | net, |
| int | w, | ||
| int | h, | ||
| int | netw, | ||
| int | neth, | ||
| float | thresh, | ||
| int * | map, | ||
| int | relative, | ||
| Darknet::Detection * | dets, | ||
| int | letter, | ||
| Darknet::Output_Object_Cache & | cache | ||
| ) |
Convert everything we've detected into bounding boxes and confidence scores for each class.
| Darknet::Layer make_yolo_layer | ( | int | batch, |
| int | w, | ||
| int | h, | ||
| int | n, | ||
| int | total, | ||
| int * | mask, | ||
| int | classes, | ||
| int | max_boxes | ||
| ) |

| void process_batch | ( | void * | ptr | ) |

| void resize_yolo_layer | ( | Darknet::Layer * | l, |
| int | w, | ||
| int | h | ||
| ) |

| int yolo_num_detections | ( | const Darknet::Layer & | l, |
| float | thresh | ||
| ) |

| int yolo_num_detections_batch | ( | const Darknet::Layer & | l, |
| float | thresh, | ||
| int | batch | ||
| ) |

| int yolo_num_detections_v3 | ( | Darknet::Network * | net, |
| const int | index, | ||
| const float | thresh, | ||
| Darknet::Output_Object_Cache & | cache | ||
| ) |
Count the number of objects found in the current image.
Only looks at the YOLO layer at index within the network. Starting with V3 JAZZ, this will also populate (appends, does not clear!) the object cache with the location of all objects found so we don't have to look through the entire YOLO output again when creating the boxes.
